Druid 几种数据摄入方式的区别
我们在从Kafka,RabbitMQ,Storm 中摄入实时数据流时到Druid的时候,可以使用Realtime Node,Index Server,Tranquility进行数据摄入。
本文主要探索这几种数据摄入方式的区别。
Realtime Node
Realtime Node 可以直接配置Firehose从Kafka,RabbitMQ等消息队列中获取数据,数据一旦被摄入,很快就可以被查询到, 同时Realtime Node还会周期性的将摄入的数据合并成Segment,提交给DeepStorage并交由Historical Node加载,以达到提供实时数据的查询的功能。
Realtime Node的局限性
但这种模式有一些缺陷
Kafka 摄入缺陷
一旦Realtime Node宕机,那么该节点上未提交的数据将全部丢失。
正常这种时候我们需要使用创建 replica 副本以保证高可用,但在使用Kafka摄入数据的场景会有一些缺陷, 这里涉及到Segment的Shard机制。
简单讲,在大量数据的摄入的场景,通常一个Segment会分为多个Shard分片,每一个分片会有不同的partitionNum 分区号。当设置了副本的时候,某个分片的副本将会拥有该分片相同的分区号。在数据查询的时候,Druid在相同分区号的分片中知会随机选择一个进行数据查询数据。
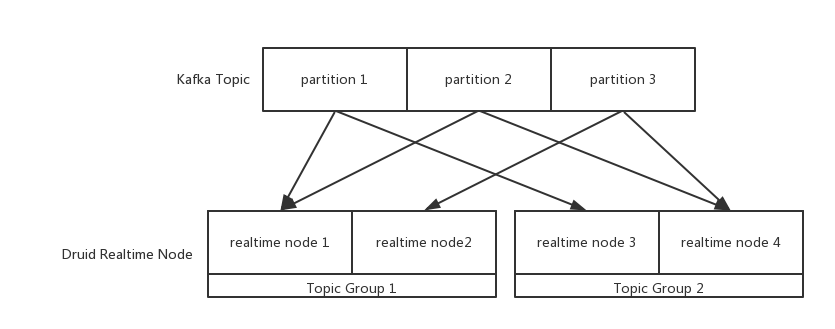
而举一个具体的场景,假如在你有一个Kafka的Topic有编号为1,2,3的partitions,并且你有2个实时节点去消费这个Topic,节点1消费了partitions 1与2, 节点2消费了partitions 3。他们拥有相同的Group。
这时候你需要进行Replication以保证高可用,所以你启动了另外2个实时节点并以新的Kafka Topic去消费数据。 这时候看节点3可能消费了partitons 1,节点4可能消费了partitions 2与3。
前文提到Segment partitionNum查询的特性,这时候Druid会认为节点3与4是同一个分区,所以数据查询只会从中挑选一个节点进行查询,但很明显他们数据是不一样的。
数据丢失风险
另外,假设你当前正在执行一个任务计算今日每个小时的数据汇总,同时你有一个批处理任务从离线集群获取数据重做Segment,并覆盖当前的Segment。
如果你在执行计算任务期间发生了Segment覆盖,那么在这个场景下很可能出现数据丢失。
Schema更新需重启节点
在Schema更新的时候,你需要重启Realtime Node以生效新的配置,这在大规模集群管理上效率非常低。
Indexing Service
以下是Druid官方的Indexing Service架构图
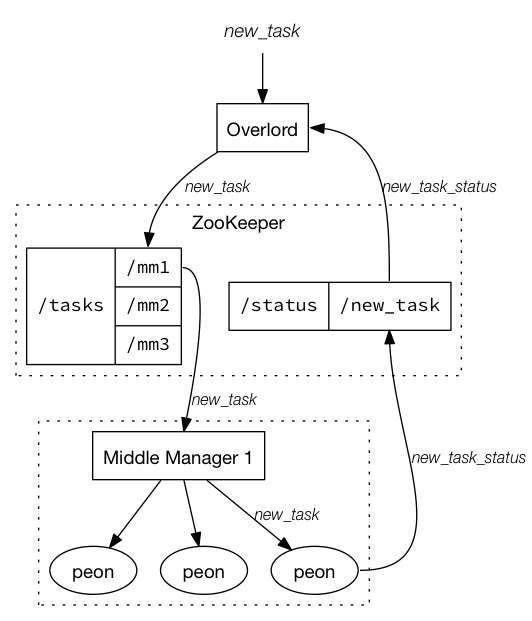
Indexing Service分为以下几个部分:
- Overload : 负责接收请求,分配任务给Middle Manager执行
- Middle Manager : 执行提交的任务的工作者节点,会将任务分发给运行在单独的JVM的Peon
- Peon : 指定Task的容器
- Task : 在Middle Manager管理的Peon下执行的任务,支持各种各样的任务如Hadoop摄入,Kafka摄入。同时开发者可以自己定制Task以满足业务需求
- ZooKeeper: 维护任务的信息
简单讲Indexing Service是一套分布式任务调度系统,按计划执行数据摄入,Segment合并,压缩,删除等任务。同时支持自定义任务扩展。
甚至你可以通过扩展将Indexing Service接入Autoscaling自动伸缩服务,在任务排队过长的时候,自动创建Middle Manager节点,再节点空闲的时候,自动进行缩容。
锁机制
Task的锁机制可以在我们进行publish segment等时候获取指定时间段的segment的排他锁或共享锁,以避免上文描述的Realtime Node Segment覆盖的时候可能产生的数据丢失风险
Kafka Indexing Service
Kafka Indexing Service 是在Indexing Service上封装的一个扩展,使用Kafka自己的分区和偏移机制来读取数据,因此能够提供准确一次的服务保证。 解决Realtime Node摄入Kafka数据的缺陷。
与 Tranquility 对比的好处是,他能够读取来自Kafka的非近期的数据,并且不受窗口期(window period )对其他摄取机制的影响。支持管理索引任务的状态,以协调切换,管理故障,并确保维护可扩展性和复制要求。
截止至当前Druid 0.11.0 Kafka Indexing server还未完全Release,需要谨慎在生产上使用。
Tranquility
Tranquility 是在 Index Service 封装的一个类库,帮助我们从Kafka,Hadoop,HTTP,Storm,Samza,Spark Streaming或者自己的JVM程序发送数据给Indexing Service。
Tranquility 实现原理
Tranquility 帮助我们解决Indexing Service在Partitioning分区, Replication副本,Service Discover服务发现,Schema rollover Schema平滑变更上的一些难题。
Tranquility基于Indexing Service的EventReceiverFirehose来实现,该Firehose会暴露一个HTTP API供Tranquility实时Push数据给Indexing Service。
在解决分区与副本问题上,Tranquility会给每一个Segment+ partitionNum指派一个Task来进行数据摄入,在超过Window Period后,Task将会停止接收数据并合并Segment,然后提交到Deep Storage。
而副本的实现上,Tranquility将每个副本创建不同Task,相同的Segment与partitionNum,相同Segment与partitionNum的数据将会同事发给相同的副本的Task,副本的Task之间乎不通讯。
当Schema发生改变的时候,在Indexing Service必须重启任务才生效。 而Tranquility的做法是只会应用到新的时间段生成的Segment,旧的Segment讲保持不变。由此时间不停机修改Schema。
最后,我们通常需要启动实例进行数据处理并发送给Druid,Tranquility使用Zookeeper管理不同实例的任务协调,保证数据被正确想到相应的Task中。
Tranquility的缺陷
- 超过Window Period的数据将会被丢弃,必须定时从离线集群中重做Segment来实现数据互补。
- Tranquility与Indexing Service的通讯异常会导致重试,无论是重试成功或失败,都可能导致数据丢失或者重复数据
总结
- Kafka Indexing Service 与 Tranquility 是官方推荐的安全的Kafka摄入数据的方式。
- 更多使用Indexing Service起替代Realtime Node